Introduction
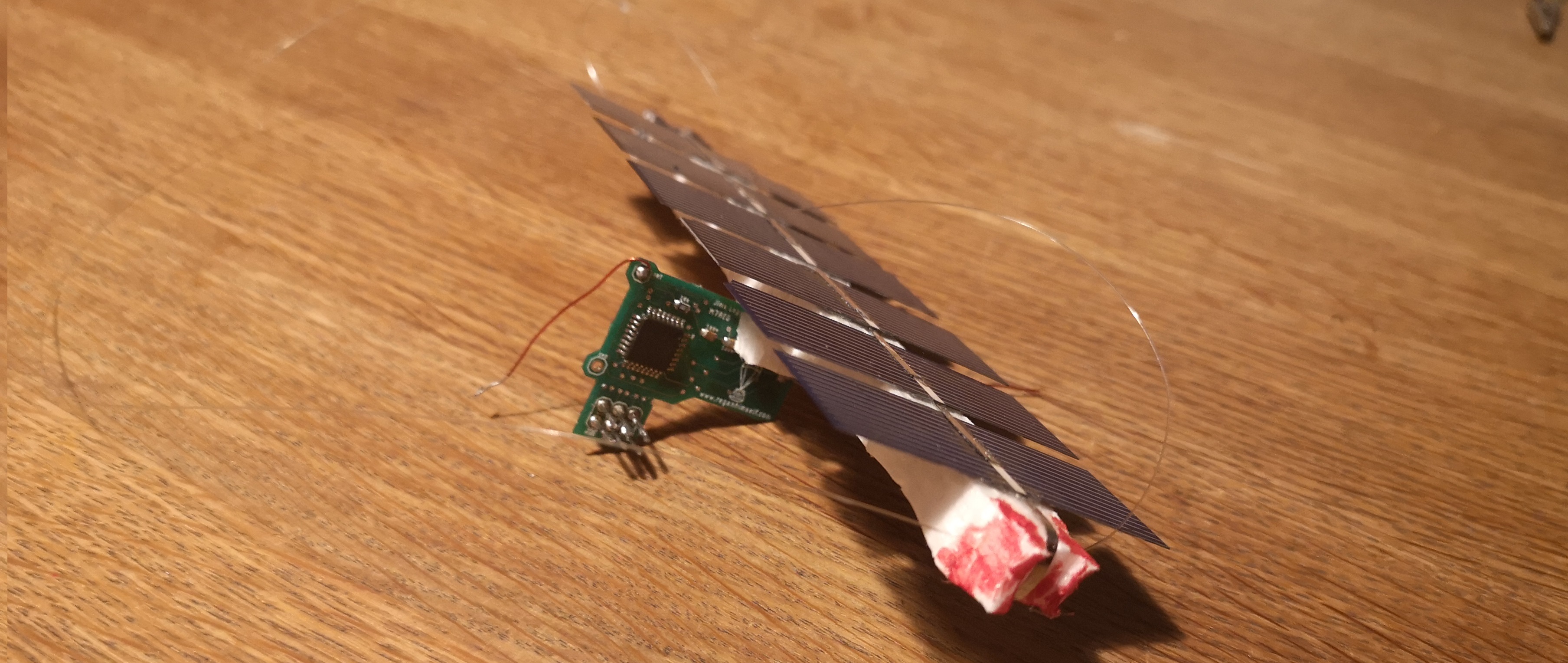
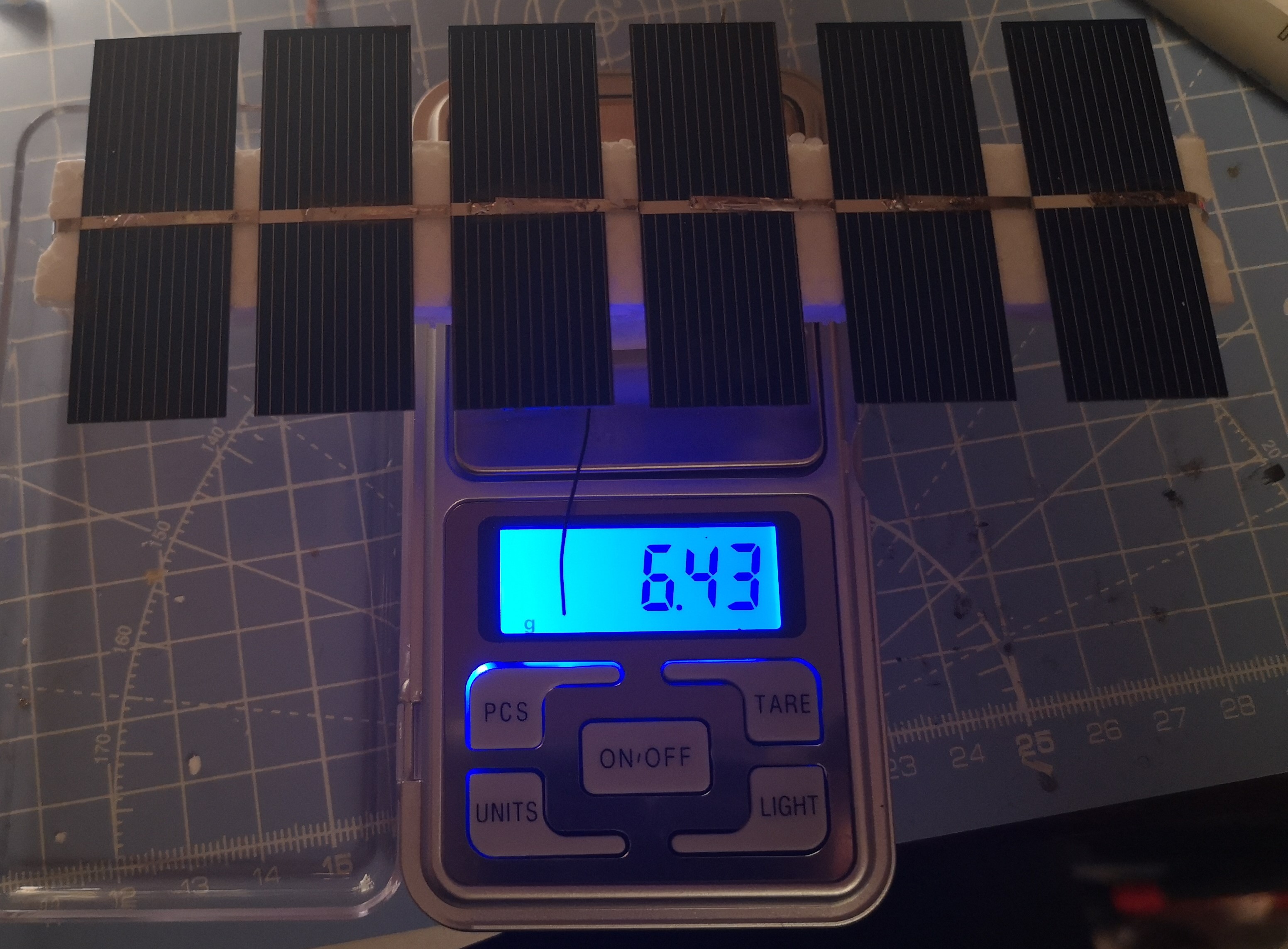
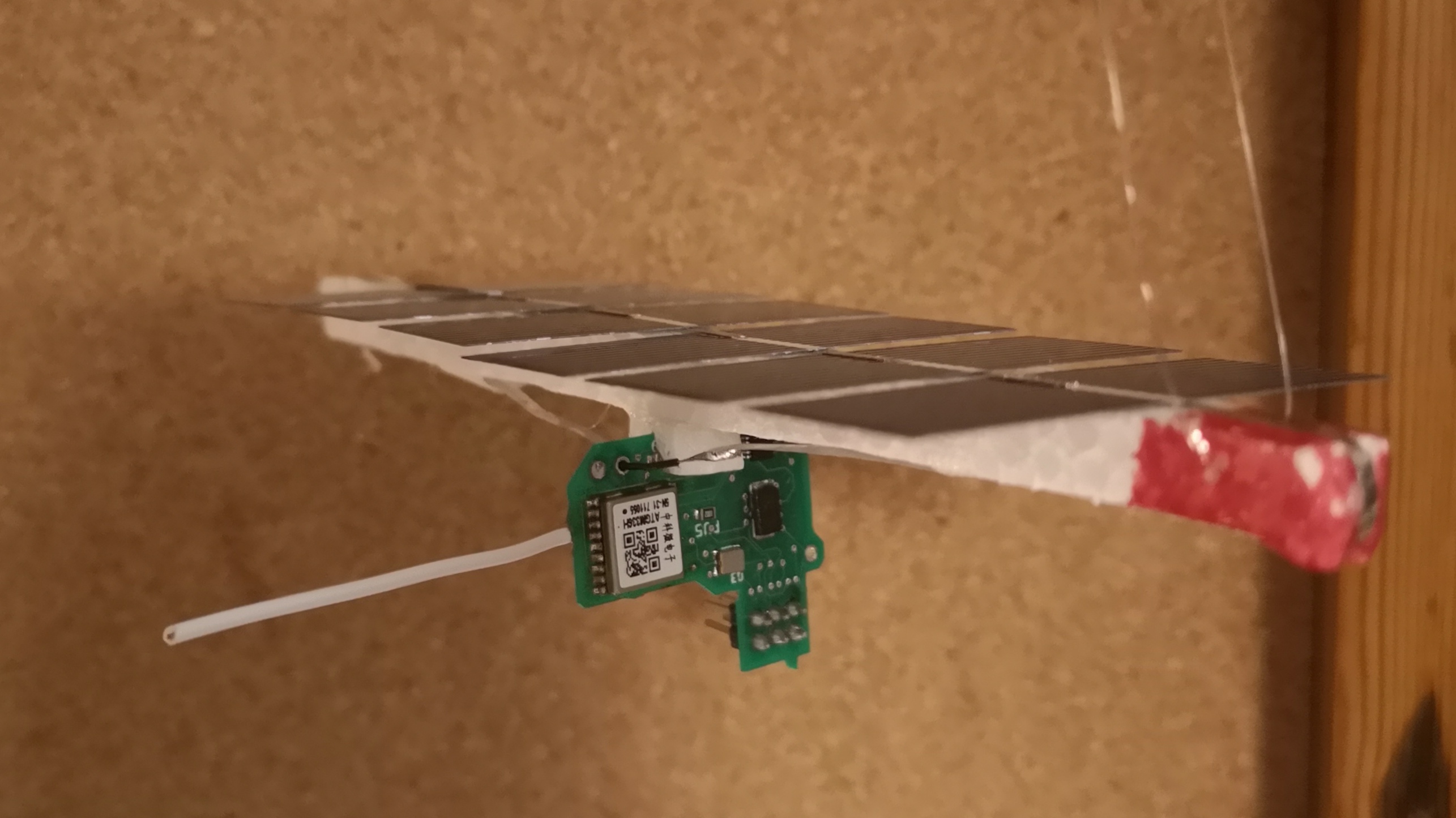
I’ve recently been experimenting with weight reduction. Having built and launched two payloads, whose flights ended very early, I have been able to learn more about how much weight can be removed before the payload becomes too flimsy to handle the conditions of flight.
Continue reading